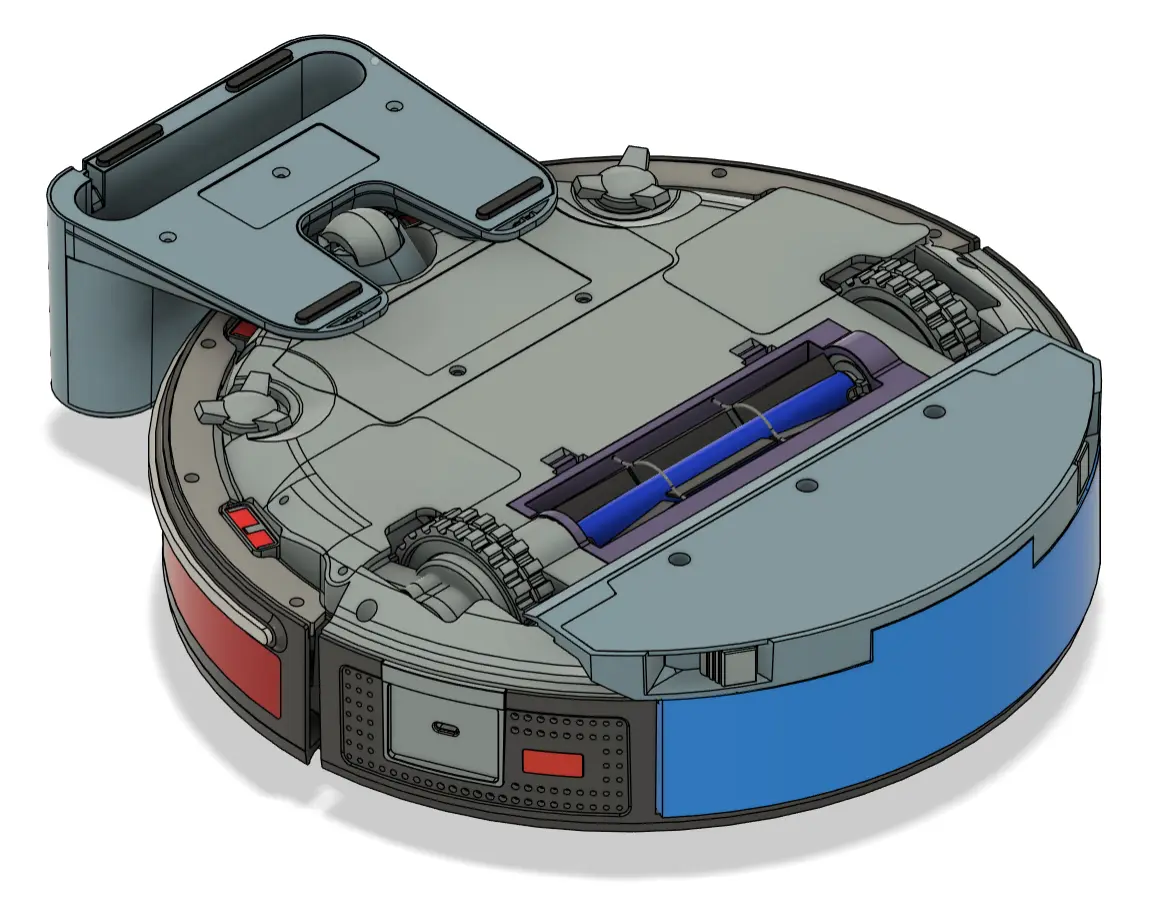
今日、私はこれまでで最も野心的な Maker Pet プロジェクトを開始します。 オムウーオープンソースの家庭用ロボット掃除機。 あなた 独自のものを作成できます。オープン ハードウェア、オープン ファームウェア、オープン ソフトウェア – そして最初のコミットからパブリックにビルドされます。
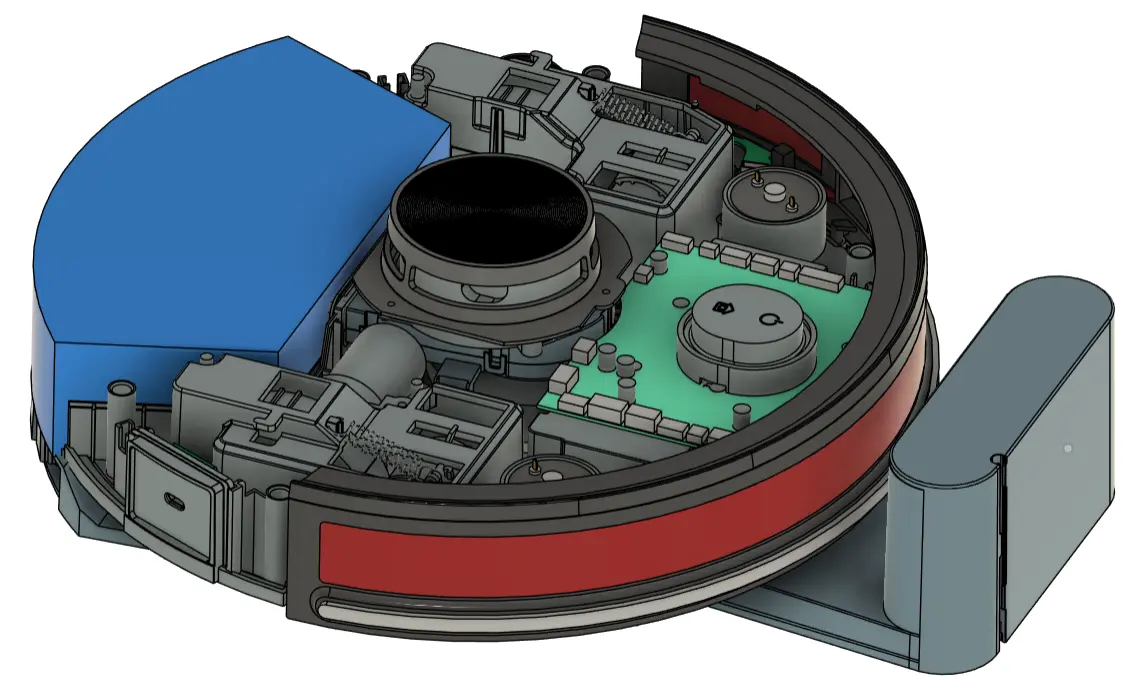
雲は必要ありません。売り手のロックインはありません。手頃な価格の 2D LiDAR で家をマッピングし、自動的にナビゲートし、ローカルで実行し、Home Assistant とシームレスに統合します。 Raspberry Pi、ROS 2、3D プリンティング、または完全に理解して制御できる掃除機を手に入れるというアイデアに興味がある場合、これはあなたのためのものです。
名前について: 「Omvu」は回転の意味不明です。ロボット自体が床の上であらゆる方向に回転しているのと同じように、均等に 180 度反転します。

オムヴとは何ですか
Omvu は、メーカー コミュニティ向けに設計された自分で組み立てるロボット掃除機です。
- リーズナブルでフルオープン – ハードウェア、ソフトウェア、ファームウェア
- 2D LiDAR マッピングと自律ナビゲーション ROS 2/Nav2あり
- 基本的なホーム アシスタントの統合 ローカルコントロール用
- 3D プリント可能、文書化された、ハッキング可能なシャーシ
- 地元第一主義 – 毎日の掃除に雲は必要ありません
- 家電製品の品質 – 無駄のない建設
- ステップバイステップのゼロからヒーローまでの組み立て説明書完全な部品表が付属しているため、各部品を自分で入手できます
オプションの追加機能 (クラウド機能、そして最終的には掃除機の動作をカスタマイズするための ROS 2 アプリのアプリストア) がその上に重ねられます。しかし、最初の約束は決して変わりません。 バキュームは、いつでもすぐに使用でき、クラウドがなく、ローカルで動作します。
今日のプロジェクトはどこですか
これは本当に予備的なものであり、それが公開で構築する目的です。最初のマイルストーン (v0) は弱い機能的な構造です。
- 3D プリントされたシャーシ
- ros 2 ガゼボ シミュレーション
- 手動SLAMを備えたLiDAR
- Raspberry Pi 5 および/または ESP32 上で ROS2 Micro-ROS を実行する (最終アーキテクチャはまだ決定中)
私が取り組んでいるオープンソースの成果物: 部品表、3D 印刷可能なファイル、ROS2 パッケージ、ファームウェア、モータードライバーとセンサー PCB、完全なビルド/起動/トラブルシューティングのドキュメント、およびデモビデオ。
私と一緒に構築しましょう – 大規模な並行作業
Omvu はコミュニティが構築できるように組織されています。 並行して。ロボットとそのソフトウェアは、自己完結型のモジュールに分割されています。興味のあるモジュールを選択し、いつでも好きなときに作業し、作業をプル リクエストとして送信します。複数の人が同じモジュールを扱うことができ、時間の経過とともに最適なソリューションが現れます。
すぐに始められるモジュールには次のものが含まれます。
- ROS2 URDF + Gazebo シミュレーション – ロボットモデル、TF、バンパー、SIM
- まずきれいにする — SLAM マッピングおよび探索中のカバレッジのクリーニング
- ゴミ箱 – 設計、3D プリント、テスト
- 真空ファン/ブロワーアセンブリ – ブロワーモーター、インペラ、ボリュートハウジング
参加したい場合は、GitHub リポジトリにモジュール リスト、アーキテクチャ ドキュメント、および貢献ガイドラインがあります。
来てください
進歩、挫折、勝利をその都度共有していきます。
OOMWOO ビルドをフォローする
オープンソースのロボット掃除機コミュニティ ビルドの更新
パーツキット
Omvu のすべてがオープンです。すべての部分に自分でアクセスできます。部品検索をスキップしたい場合は、このプロジェクトと同じメーカーの機能キット (モーター、PCB、ブラシ、ガスケット、LiDAR) が Maker Pet で入手できます。キットは便利なので、 必要は決してありません。









Leave a Reply